In mid-December 2025, the РА "Red Crescent Society of the Republic of Kazakhstan" held a short film competition on the theme "Fundamental Principles o Read more
Quotation gallery
Intelligence plus character – that is the goal of true education.
Martin Luther King.
Faculty News
On December 26, 2025, the Faculty of History, Economics and Law held a final meeting of the Faculty Council dedicated to summarizing the results of th Read more
17.12.2025 на медицинском факультете НАО СКУ им.М.Козыбаева началась экзаменационная сессия. С целью укрепление принципов академической честности, про Read more
12 декабря 2025 года, в рамках реализации плана научных мероприятий медицинского факультета на 2025–2026 годы, был проведён практический семинар с гру Read more
On December 2, 2025, the Department of Justice of the North Kazakhstan region held a lecture for students as part of the implementation of the ideolog Read more
On November 27, 2025, the Faculty of History, Economics and Law hosted a seminar by business consultant and MBA teacher Sh.I. Orazbayeva on the topic Read more
На факультете прошёл круглый стол со студентами 5 курса фармацевтического профиля на тему «Надлежащие аптечные практики: цели, задачи и подходы к реал Read more
From November 12, 2025 at the medical faculty of SKU named after M. Kozybaev as a visiting professor, prof. Claudio Colosio from the University of Mil Read more
19.11.2025 года на медицинском факультете был проведен круглый стол «Патриотизм как научная и нравственная позиция Манаша Козыбаева», посвящённый дню Read more
Круглый стол «Роль Манаша Козыбаева в развитии гуманитарного образования в Казахстане», посвящённый дню рождения выдающегося казахстанского учёного-гу Read more
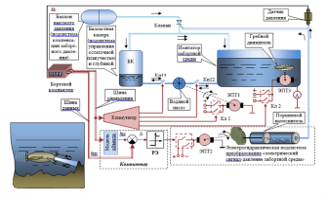
Development of an on-board control system of an autonomous unmanned underwater vehicle, optimal in terms of energy consumption
Priority area: National security and defense

Project manager: Gerasimova Yu.V., Ph.D.
Project executors: Gerasimova Yu.V., Ph.D., Ivel V.P., Ph.D., Avdeev V.N., Ph.D., Moldakhmetov S.S., Master of Technical sciences, doctoral candidate PhD, Petrov P.A., master of technical sciences, doctoral candidate PhD.
Terms of execution: 2019-2021
Amount of financing: 105,000,000 tenge.
Project goal: Development of a control system for an autonomous unmanned underwater vehicle, as a carrier of special-purpose equipment, ensuring high accuracy when moving and positioning it at a given depth in conditions of external interference from the environment, minimizing energy costs and increasing the duration of autonomous navigation.
Expected results: Development of a computer simulating complex-stand designed to study the operating modes of the AUV control system, its debugging and diagnostics in real time, will reduce the time and cost of developing modern underwater robotic systems intended for military purposes. Obtaining a patent for a utility model.
Description of the project: In recent years, a significant number of autonomous unmanned underwater vehicles (AUVs) have been created in various countries holding a leading position in the field of marine technology to solve a wide range of scientific and applied problems in marine areas.
There is a need for the development and implementation of technologies for the development and creation of underwater robotics in the Republic of Kazakhstan.
Project objectives:
−application of the parametric identifier of nonlinear hydrodynamic parameters of the AUV in order to optimize control processes;
−development of a dual-processor on-board control system based on 32-bit ARM processors for the implementation of algorithms for parallel signal processing;
−development of a hardware and software bench that allows for semi-natural tests of the control system, including sensors and a complex of electromechanical, hydraulic and pneumatic actuators.